

중공 로터리 플랫폼의 회전 속도와 정밀도를 고 진수 응용 분야에 어떻게 최적화 할 수 있습니까?
 2025.04.18
2025.04.18
 업계 뉴스
업계 뉴스
회전 속도와 정밀도 최적화 중공 로타리 플랫폼 고 진수 응용 프로그램의 경우 여러 설계 및 엔지니어링 요소에주의를 기울여야합니다. 이 최적화를 달성 할 수있는 방법은 다음과 같습니다.
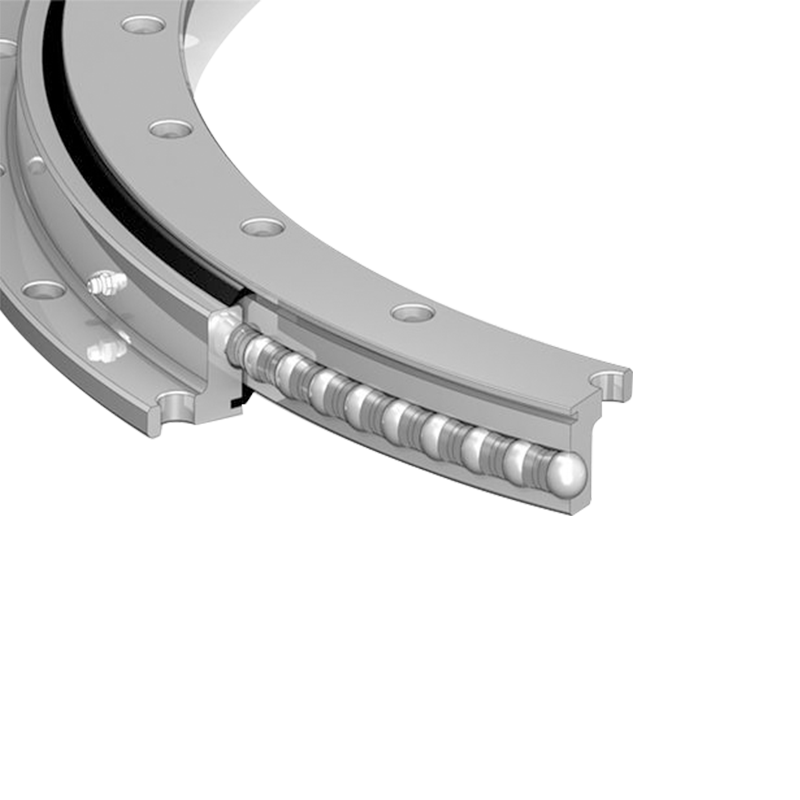
1. 정밀 베어링
-
고품질 베어링 : 정밀 베어링의 선택은 마찰을 최소화하고 부드러운 회전을 보장하는 데 중요합니다. 세라믹과 강철의 조합으로 만들어진 세라믹 또는 하이브리드 베어링은 전통적인 금속 베어링에 비해 우수한 정밀도, 마모 감소 및 고속 기능을 제공합니다.
-
예압 베어링 : 베어링에 예압을 적용하면 축 재생을 최소화하고 플랫폼의 안정성을 향상시킬 수 있습니다. 이것은 또한 특히 더 높은 회전 속도에서보다 정확한 움직임을 달성하는 데 도움이됩니다.
2. 드라이브 시스템
-
서보 모터 : 정밀도가 높은 응용 분야의 경우 서보 모터 또는 스테퍼 모터를 사용하면 회전 속도와 위치를보다 정확하게 제어 할 수 있습니다. 이 모터는 고정밀 조정과 일관된 회전 속도가 가능하며, 이는 고정밀 작업에 필수적입니다.
-
폐 루프 제어 시스템 : 운동 속도를 지속적으로 모니터링하고 조정하는 폐쇄 루프 제어 시스템은 다양한 하중에서도 원하는 회전 속도를 유지할 수 있습니다. 이를 통해 플랫폼 운영 전반에 걸쳐 일관된 정밀도를 보장합니다.
-
기어 박스 또는 감소 기어 시스템 : 로터리 플랫폼이 속도가 느리지 만 토크와 정밀도로 회전 해야하는 경우 기어 박스를 적절한 감소 비율로 통합하면 회전 속도와 위치 정확도를 잘 제어 할 수 있습니다.
3. 피드백 및 센서
-
인코더 : 고해상도 광학 또는 자기 인코더는 로터리 플랫폼의 위치와 속도에 대한 피드백을 제공하여 실시간 조정이 정확도를 유지할 수 있도록합니다. 이 인코더는 위치와 속도의 미세한 변화를 감지하여 플랫폼의 성능을 미세 조정할 수 있습니다.
-
선형 가변 차동 변압기 (LVDT) : 매우 높은 분야의 응용 분야의 경우 LVDT를 사용하여 플랫폼의 위치 또는 이동시 이동을 모니터링 할 수 있습니다. 이 센서는 플랫폼의 회전에 대한 미묘한 수준의 피드백을 제공 할 수 있습니다.
-
폐 루프 피드백 시스템 : 모터 및 인코더와 통합 된이 시스템은 연속 조정을 허용하여 회전 속도와 위치가 작동 전반에 걸쳐 높은 정확도로 유지 될 수 있도록합니다.
4. 구조 설계 및 재료 선택
-
저중 및 고 강성 재료 : 플랫폼 구조를위한 알루미늄 합금, 탄소 섬유 또는 경량 금속과 같은 재료를 사용하면 관성을 줄여서 속도와 정밀도를 모두 향상시킬 수 있습니다. 이 재료는 또한 회전 중 진동을 줄이고 동적 응답을 향상시키는 데 기여합니다.
-
변형 최소화 : 정밀도를 유지하려면 플랫폼의 구조적 무결성을 보장하는 것이 필수적입니다. 플랫폼의 굴곡 또는 뒤틀림을 줄이기 위해 강력하고 견고한 재료와 신중한 설계를 사용하면 고속 회전 중에 잠재적 인 오류 원인이 최소화됩니다.
5. 진동 감쇠
-
댐핑 시스템 : 진동은 특히 높은 회전 속도에서 정밀도에 영향을 미치는 중요한 요소가 될 수 있습니다. 점탄성 재료, 진동 요소 또는 활성 감쇠 장치와 같은 댐핑 시스템을 통합하면 외부 진동 및 내부 진동의 영향을 줄일 수 있습니다.
-
밸런싱 : 작은 불균형조차도 정밀도를 저하시키는 진동으로 이어질 수 있으므로 플랫폼의 적절한 균형을 잡는 것이 중요합니다. 제조 공정에서 동적 밸런싱은 플랫폼이 모든 회전 속도로 원활하게 작동하도록합니다.
6. 열 관리
-
냉각 시스템 : 높은 회전 속도는 열을 생성하여 열 팽창을 유발하여 정밀도에 영향을 줄 수 있습니다. 활성 냉각 시스템 (팬 또는 액체 냉각과 같은) 또는 수동 냉각 기술 (예 : 방열판)을 사용하면 열 영향이 플랫폼의 성능에 영향을 미치는 것을 방지 할 수 있습니다.
-
열 보정 : 일부 고정밀 로터리 플랫폼은 열 팽창 계수가 낮은 재료 또는 온도로 인한 변화를 보상 할 수있는 시스템으로 설계되어 플랫폼이 다양한 온도 조건에서도 정확도를 유지하도록합니다.
7. 제어 소프트웨어 및 알고리즘
-
고급 제어 알고리즘 : 실시간 피드백을 기반으로 운동 속도, 토크 및 위치를 동적으로 조정하는 정교한 알고리즘을 구현하면 회전 속도를 최적화하고 정확한 제어를 보장 할 수 있습니다. 이 알고리즘은 외부 교란, 마찰 및 하중 변동으로 인한 오류를 줄이는 데 도움이됩니다.
-
PID (비례 integral-indevative) 제어 : 미세 조정 PID 제어 루프는 속도와 위치를보다 잘 제어하여 실시간의 작은 오류를 수정하고 전반적인 정확도를 향상시킬 수 있습니다. 이러한 제어 시스템은 원하는 파라미터를 지속적으로 조정하여 원하는 대상과 실제 회전 사이의 오차를 최소화합니다.
8. 회전 안정성
-
자이로 스코프 효과 : 높은 회전 속도는 운동의 정밀도에 영향을 줄 수있는 자이로 스코프 효과를 유발할 수 있습니다. 디자인 (예 : 카운터 웨이트 또는 안정화 시스템)을 통해 이러한 효과를 반박하면 플랫폼의 안정성과 회전 정확도를 유지하는 데 도움이됩니다.
-
동적 밸런싱 : 중공 로타리 플랫폼의 설계는 불균형으로 인해 고속에서 정밀하고 부드러운 작동에 부정적인 영향을 미치는 원심력으로 이어질 수 있으므로 질량 분포가 균형을 이루어야합니다.
9. 매끄럽게 하기
-
고급 윤활 시스템 : 이동 구성 요소, 특히 높은 회전 속도에서 마찰을 최소화하고 마모를 최소화하려면 적절한 윤활이 필수적입니다. 고품질 윤활제를 사용하여 제어 된 방식으로 (예 : 자동 윤활 시스템을 통해) 적용하면 일관된 성능과 수명이 보장됩니다.
-
그리스 대 오일 : 고속 응용 분야의 경우 점도, 열 안정성 및 작동 환경과의 호환성을 기반으로 한 올바른 윤활 (오일 또는 그리스)을 선택하는 것이 부드럽고 정확한 움직임을 유지하는 데 중요합니다.
10. 외부 시스템과의 통합
-
다른 장비와 동기화 : 일부 애플리케이션에서는 중공 로터리 플랫폼이 다른 기계 또는 로봇 암과 동기화되어야 할 수도 있습니다. 통신 프로토콜 또는 네트워크 컨트롤을 통한 외부 시스템 (예 : 컨베이어 또는 CNC 기계)과 호환성 및 동기화를 보장하면 정확한 이동 및 운영을 유지하는 데 도움이됩니다.

Jiangsu Manchen Transmission Technology Co., Ltd.는 다양한 산업을위한 맞춤형, 신뢰할 수 있고 정확한 순수선 베어링을 만들고 최고 수준을 충족시키고 협업 기회를 찾기 위해 지속적으로 혁신했습니다. 중국의 신뢰할 수 있고 꾸준한 슬리핑 베어링 공급 업체.
제품 링크
저희에게 연락하십시오
-
Address:8 번, Nanqiu Road, Huangtu Town, Jiangyin City, 중국
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
